diff --git a/.pre-commit-config.yaml b/.pre-commit-config.yaml
index 4f0bdf35ad..73e308987f 100644
--- a/.pre-commit-config.yaml
+++ b/.pre-commit-config.yaml
@@ -23,13 +23,13 @@ repos:
- --maxkb=500
- --enforce-all
- repo: https://github.com/codespell-project/codespell
- rev: v2.2.5
+ rev: v2.2.6
hooks:
- id: codespell
exclude: '^(third_party/)|(body/)|(cereal/)|(rednose/)|(panda/)|(laika/)|(opendbc/)|(laika_repo/)|(rednose_repo/)|(selfdrive/ui/translations/.*.ts)|(poetry.lock)'
args:
# if you've got a short variable name that's getting flagged, add it here
- - -L bu,ro,te,ue,alo,hda,ois,nam,nams,ned,som,parm,setts,inout,warmup,bumb,nd,sie
+ - -L bu,ro,te,ue,alo,hda,ois,nam,nams,ned,som,parm,setts,inout,warmup,bumb,nd,sie,preints
- --builtins clear,rare,informal,usage,code,names,en-GB_to_en-US
- repo: local
hooks:
@@ -41,7 +41,7 @@ repos:
args: ['--explicit-package-bases']
exclude: '^(third_party/)|(cereal/)|(opendbc/)|(panda/)|(laika/)|(laika_repo/)|(rednose/)|(rednose_repo/)|(tinygrad/)|(tinygrad_repo/)|(xx/)'
- repo: https://github.com/astral-sh/ruff-pre-commit
- rev: v0.0.291
+ rev: v0.0.292
hooks:
- id: ruff
exclude: '^(third_party/)|(cereal/)|(rednose/)|(panda/)|(laika/)|(laika_repo/)|(rednose_repo/)|(tinygrad/)|(tinygrad_repo/)'
diff --git a/common/transformations/README.md b/common/transformations/README.md
index 13878cb99c..42a060da80 100644
--- a/common/transformations/README.md
+++ b/common/transformations/README.md
@@ -11,7 +11,7 @@ by generating a rotation matrix and multiplying.
| :-------------: |:-------------:| :-----:| :----: |
| Geodetic | [Latitude, Longitude, Altitude] | geodetic coordinates | Sometimes used as [lon, lat, alt], avoid this frame. |
| ECEF | [x, y, z] | meters | We use **ITRF14 (IGS14)**, NOT NAD83.
This is the global Mesh3D frame. |
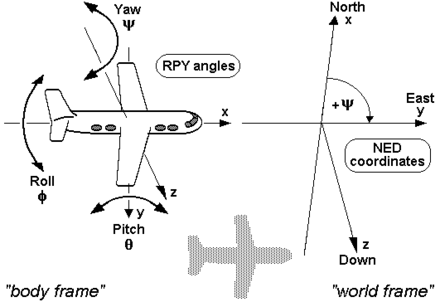
-| NED | [North, East, Down] | meters | Relative to earth's surface, useful for vizualizing. |
+| NED | [North, East, Down] | meters | Relative to earth's surface, useful for visualizing. |
| Device | [Forward, Right, Down] | meters | This is the Mesh3D local frame.
Relative to camera, **not imu.**
|
| Calibrated | [Forward, Right, Down] | meters | This is the frame the model outputs are in.
More details below.
|
| Car | [Forward, Right, Down] | meters | This is useful for estimating position of points on the road.
More details below.
|
diff --git a/poetry.lock b/poetry.lock
index 89f8254a33..5a53c98c2f 100644
--- a/poetry.lock
+++ b/poetry.lock
@@ -1,3 +1,3 @@
version https://git-lfs.github.com/spec/v1
-oid sha256:93a8082108ef1aebdfe11286d68b220ac5129374ce0fe3bf226677837ebe5bb9
-size 446442
+oid sha256:f71f613f59be58d7598daad562c360338ff9877b63caff3d67113d902c6d671c
+size 450611
diff --git a/selfdrive/ui/qt/widgets/input.h b/selfdrive/ui/qt/widgets/input.h
index 917ea21b57..089e54e4a0 100644
--- a/selfdrive/ui/qt/widgets/input.h
+++ b/selfdrive/ui/qt/widgets/input.h
@@ -26,7 +26,7 @@ class InputDialog : public DialogBase {
public:
explicit InputDialog(const QString &title, QWidget *parent, const QString &subtitle = "", bool secret = false);
- static QString getText(const QString &title, QWidget *parent, const QString &substitle = "",
+ static QString getText(const QString &title, QWidget *parent, const QString &subtitle = "",
bool secret = false, int minLength = -1, const QString &defaultText = "");
QString text();
void setMessage(const QString &message, bool clearInputField = true);
diff --git a/system/sensord/pigeond.py b/system/sensord/pigeond.py
index fc5c05e64f..2e8f151d17 100755
--- a/system/sensord/pigeond.py
+++ b/system/sensord/pigeond.py
@@ -164,12 +164,12 @@ def initialize_pigeon(pigeon: TTYPigeon) -> bool:
pigeon.send_with_ack(b"\xB5\x62\x06\x08\x06\x00\x64\x00\x01\x00\x00\x00\x79\x10")
# UBX-CFG-NAV5 (0x06 0x24)
- pigeon.send_with_ack(b"\xB5\x62\x06\x24\x24\x00\x05\x00\x04\x03\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x5A\x63") # noqa: E501
+ pigeon.send_with_ack(b"\xB5\x62\x06\x24\x24\x00\x05\x00\x04\x03\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x5A\x63")
# UBX-CFG-ODO (0x06 0x1E)
pigeon.send_with_ack(b"\xB5\x62\x06\x1E\x14\x00\x00\x00\x00\x00\x01\x03\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x3C\x37")
pigeon.send_with_ack(b"\xB5\x62\x06\x39\x08\x00\xFF\xAD\x62\xAD\x1E\x63\x00\x00\x83\x0C")
- pigeon.send_with_ack(b"\xB5\x62\x06\x23\x28\x00\x00\x00\x00\x04\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x01\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x56\x24") # noqa: E501
+ pigeon.send_with_ack(b"\xB5\x62\x06\x23\x28\x00\x00\x00\x00\x04\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x01\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x56\x24")
# UBX-CFG-NAV5 (0x06 0x24)
pigeon.send_with_ack(b"\xB5\x62\x06\x24\x00\x00\x2A\x84")
diff --git a/tools/cabana/chart/chart.cc b/tools/cabana/chart/chart.cc
index 70536cc0c2..2bd6cfd6cc 100644
--- a/tools/cabana/chart/chart.cc
+++ b/tools/cabana/chart/chart.cc
@@ -169,7 +169,7 @@ void ChartView::msgUpdated(MessageId id) {
}
void ChartView::manageSignals() {
- SignalSelector dlg(tr("Mange Chart"), this);
+ SignalSelector dlg(tr("Manage Chart"), this);
for (auto &s : sigs) {
dlg.addSelected(s.msg_id, s.sig);
}
diff --git a/tools/replay/replay.cc b/tools/replay/replay.cc
index c11eb0915d..d3a32a2651 100644
--- a/tools/replay/replay.cc
+++ b/tools/replay/replay.cc
@@ -433,7 +433,7 @@ void Replay::stream() {
long etime = (cur_mono_time_ - evt_start_ts) / speed_;
long rtime = nanos_since_boot() - loop_start_ts;
long behind_ns = etime - rtime;
- // if behind_ns is greater than 1 second, it means that an invalid segemnt is skipped by seeking/replaying
+ // if behind_ns is greater than 1 second, it means that an invalid segment is skipped by seeking/replaying
if (behind_ns >= 1 * 1e9 || speed_ != prev_replay_speed) {
// reset event start times
evt_start_ts = cur_mono_time_;